




 Qzone
Qzone
 微博
微博
 微信
微信


采用机器学习技术,苏黎世联邦理工学院(ETH)的研究人员开发了一种新颖且低成本的触觉传感器,该传感器能够以高分辨率和高精度测量力的分布,使机械臂能够抓住敏感或易碎的物体。
人类可以轻松的用手抓取易碎或湿滑的物体,触觉使我们可以自我判断是否牢固抓住了该物体,或者该物体是否会从手指滑落,从而相应的进行调整抓取的力度。同样,对于需要抓取易碎、易滑或表面复杂的物体的机器手臂也需要相同的反馈。
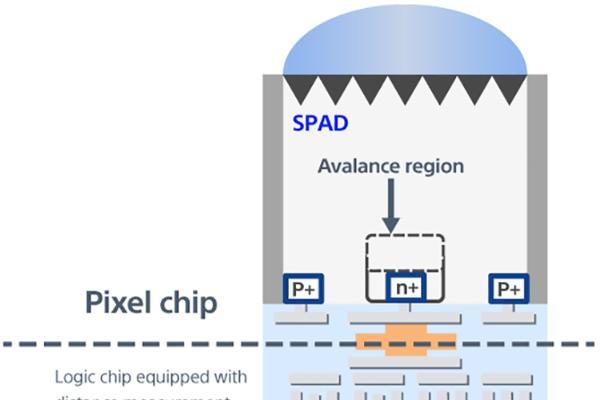
为此,苏黎世联邦理工学院的机器人研究人员开发了一种触觉传感器,并认为是向“机器人皮肤”迈出的重要一步。这种触觉传感器可以在上述情况下派上用场。研究人员指出,该传感器设计简单,所以生产成本低廉。本质上,它由一个带有彩色塑料微珠的弹性硅树脂“皮肤”和一个固定在底部的普通摄像头组成。
使用纯光学输入的测量方法
该传感器是基于视觉运转:当其与物体接触时,硅胶皮肤上会出现一个凹痕,并改变了微珠的图案,该图案由传感器下侧的鱼眼镜头记录。根据图案的这些变化,系统可以计算出传感器上的力分布。

苏黎世联邦理工学院动态系统与控制学博士生Carlo Sferrazza表示:“传统的传感器只能在一个点上记录施加的力,相比之下,我们的机器人皮肤使我们能够区分作用在传感器表面上的多个力,并以较高的分辨率和精度对其进行计算,我们甚至可以确定一个力的作用方向。”换句话说,研究人员不仅可以识别施加在传感器上的垂直压力,还可以识别横向作用的剪切力。
基于数据的开发
为了计算出是哪些力将微珠推向哪个方向,研究人员使用了一组全面的实验数据:在通过机器控制进行标准化的测试中,他们研究了不同的传感器接触情况,并能够精确的控制和系统的改变接触的位置、力的分布和接触物体的大小。通过采用机器学习技术,研究人员记录了数千个接触实例,并将它们与微珠图案的变化精确匹配。
迄今为止,研究人员制造的最薄传感器原型厚度为1.7厘米,测量表面为5 x 5厘米。不过,研究人员正致力于使用相同的技术来实现更大的传感器表面,并配备了多个摄像头,从而能够识别复杂形状的物体。此外,他们的目标是使传感器更薄——他们相信使用现有技术可以实现仅0.5厘米的厚度。
机器人、体育和VR
由于弹性硅树脂是防滑材质,并且传感器可以测量剪切力,所以它非常适合用于机器人手臂。Sferrazza表示:“当物体有可能在机械手臂抓取时滑出时,传感器就会进行识别,以便机器人可以调整其抓取力。”
研究人员还可以使用这种传感器来测试材料的硬度或数字化触摸图,如果该传感器集成到可穿戴设备中,骑自行车者可以通过踏板测量他们对自行车施加的力,或者跑步者可以测量在慢跑时对鞋子作用的力。最后,该传感器可以为包括开发VR游戏在内的触觉反馈应用提供重要的信息。
作者:威廉
【以上内容转自“93913网”,不代表本网站观点。 如需转载请取得93913网站许可,如有侵权请联系删除。】




lookin2023-03-15 19:0203-15 19:02

lookin2023-03-15 18:1403-15 18:14

威锋网2023-03-15 20:1803-15 20:18

热点科技网2023-03-15 20:1803-15 20:18

威锋网2023-03-15 20:1403-15 20:14

娱乐中国2023-03-15 20:1403-15 20:14

娱乐中国2023-03-15 20:1103-15 20:11

e线资讯2023-03-15 20:1103-15 20:11
娱乐中国2023-03-15 20:1103-15 20:11






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>









 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报