Qzone
Qzone
 微博
微博
 微信
微信
云骥智行不断加快技术创新步伐,探索自动驾驶领域前沿技术边界,在多视角视觉3D感知和Image-to-BEV变换等方向与浙江大学自动驾驶团队展开合作,取得了阶段性成果。在此期间,双方合作参加了2022 CVPR Waymo开放数据集挑战赛并斩获其中高难度赛道奖项。
CVPR是一年一度的全球计算机视觉领域的顶级会议,每年均会吸引大量高校、研究机构和科技公司参与。“Waymo公开数据集挑战”在今年的CVPR推出了四项挑战,分别为运动预测、乘员流场预测、基于视觉的3D目标检测和3D语义分割,其中参赛者大多来自世界最顶级的学校、企业或科研单位,包括麻省理工学院、上海人工智能实验室、清华大学、北京大学、浙江大学、香港中文大学等等,所展示的方法均代表着每个比赛领域中当前最先进的水平,因而该比赛是一项极具挑战的国际级别竞赛。云骥智行和浙大团队合作参与了其中难度高的 “基于视觉的3D目标检测“挑战。3D目标检测,可谓是自动驾驶的基石原点,只有准确检测并正确预测出车辆、行人位置、方位和速度等信息,才能引导自动驾驶车辆正确安全地行驶在道路上。多摄像头3D感知能以低成本获得3D信息,并和3D激光雷达检测互为补充,形成更优的自动驾驶解决方案。
在此次挑战中,参赛团队合作在自动驾驶视觉3D感知中,通过深度神经网络从多摄像头的2D图像学习推理直接获得3D目标信息,完成对周围场景的3D感知。目前常用的基于单目检测和跨摄像头后处理的技术解决方案,会割裂多个摄像头之间的联系,无法完成跨摄像头信息的提取。合作团队更创新地采取多个摄像头联合处理的视觉方案,得到整个车身周围空间的BEV场景信息,后续在BEV视角下对目标的3D信息进行精准感知。值得一提的是,和目前业界主流对视觉3D感知的研究仍停留在算法层面不同,合作团队已实现了多视角视觉360° 3D感知在实车上的实时部署和应用,充分体现了强大的软件优化和工程落地能力。
在本次比赛中,参赛团队仅用两周时间打造了一个简洁、灵活且高性能的基线模型。在没有使用任何复杂的训练、推理技巧,数据增强且只利用少量计算资源的情况之下,该模型从众多方法中脱颖而出,获得奖项。
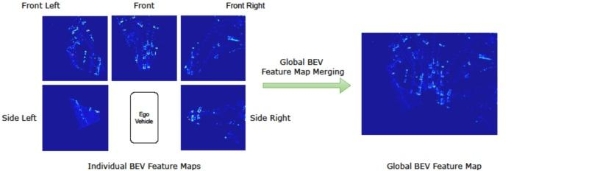
图1:利用环视多相机作为输入,生成全局BEV特征图
赛后,合作团队所使用方案的科技报告还在CVPR 2022自动驾驶研讨会(Workshop on Autonomous Driving, WAD)中进行展示。CVPR自动驾驶研讨会作为CVPR研讨会项目之一,每年都聚集了来自学术界和工业界最顶尖的研究人员和工程师,探讨自动驾驶感知领域的最前沿技术、最新的进展以及未来的方向。
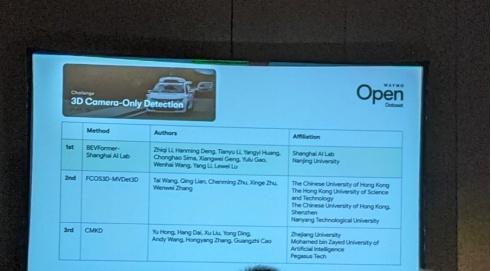
图2:Waymo自动驾驶研讨会现场,图源:云骥智行团队现场拍摄
云骥智行将按下产研合作的启动键,以前瞻视野超快布局,用创新之力与全球顶级高校实现技术和资源的强强联合,携手探索自动驾驶前沿课题,突破技术天花板,推进自动驾驶领域驶向快车道。
作为一家致力于打造中国最先进的L4级别自动驾驶通用平台解决方案的初创公司,云骥智行不仅在短时间内集结了业界一流的研发团队,更以丰富的产业资源和商业化落地能力,快速推进跨平台一体化解决方案在多场景中的逐城落地,参与制定世界领先的行业标准。
















TOM2025-07-09 18:3907-09 18:39

TOM2025-07-09 17:5807-09 17:58

TOM2025-07-09 17:5807-09 17:58

TOM2025-07-09 17:5507-09 17:55

TOM2025-07-09 17:5507-09 17:55






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>