Qzone
Qzone
 微博
微博
 微信
微信
近日,据解放日报报道,成立不到一年半的具身智能初创企业它石智航,正在把机器人推向真实产业现场。日前,它石智航首席科学家丁文超在接受采访时表示,具身智能的价值不应停留在炫技式演示,而应率先解决工厂中“人不想干、但必须干”的现实痛点。
在工业自动化领域,长程操作、柔性物体、亚毫米精度,长期被视为难以同时实现的“不可能三角”。其中,柔性线束装配被称为自动化领域的“哥德巴赫猜想”:线束本身柔软易变形,插孔间隙往往只有0.1至0.5毫米,机器人既要完成长程操作,又要保持极高精度,还要应对柔性材料随时发生的形变。
这一公认难题,成为它石智航创业后选择攻克的核心场景。丁文超表示,线束装配劳动强度大、重复性高,对熟练工依赖强,且一线人员流失率居高不下,几十年来始终缺乏实质性自动化升级。
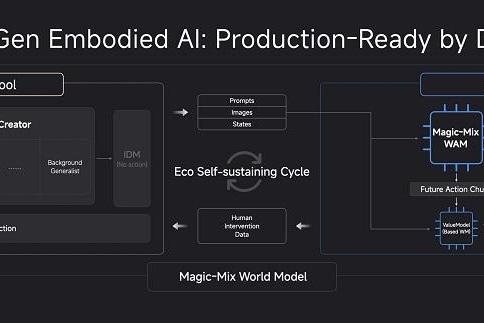
在2026年中AWE上,它石智航展示了世界首个能干活的自研通用具身大模型AWE3.0。依托该模型,它石智航A1机器人连续长程工作,在1小时内完成百余次亚毫米级完整线束精密装配任务,并获得吉尼斯世界纪录。这一成果意味着,具身智能不再只是停留于实验室演示,而是在真实工业级场景中完成了验证。

它石认为,真正有产业价值的具身智能,必须能够适应复杂、非结构化、充满变化的真实环境。与传统自动化依赖固定工装、规则程序不同,具身智能需要具备理解物理世界、预测变化并执行交互的能力。
它石智航选择了一条以人为中心的数据路线:通过可穿戴式设备,从人的第一视角采集真实操作数据,再借助具身大模型,将人类动作能力迁移到机器人上。丁文超解释,自动驾驶做到成熟需要百万小时级别的数据,而具身智能的复杂度至少更高一个数量级,可能需要千万小时级别的数据。如果单靠遥操作采集,效率远远不够;如果完全依赖遥操作又难以覆盖复杂场景。因此,回到“人”本身,成为他们认为更可行的路径、更能实现模型scalinglaw的路径。
它石一直坚持具身智能首先应该进入工厂,承担那些高强度、重复性、对人并不友好的工作。调研线束工厂时,团队曾看到一线工人在盛夏环境中反复进行同一个动作,一天甚至重复上万次。这让团队更加坚定:机器人真正的价值,是接住这些必须有人做、但并不适合长期由人承担的劳动。
从柔性线束装配切入,再到以高难度工业场景验证具身智能的底层能力,它石始终走在推动机器人从“能看、能动”到“能理解、能操作、能交付”的路上。










TOM2026-05-13 10:5205-13 10:52

环球旅讯2026-05-13 10:3905-13 10:39

盖世汽车2026-05-13 10:3405-13 10:34

TOM2026-05-13 10:0005-13 10:00

TOM2026-05-13 09:5905-13 09:59






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>